
INTRODUCCIÓN
La automatización basada en robots es una tecnología madura y probada en muchas industrias como la de la automoción y la electrónica. Sin embargo, es relativamente nueva en la industria alimentaria que, en poco tiempo, ha pasado de ser un sector basado en el uso intensivo de mano de obra a una industria muy automatizada. En la actualidad son muchas las empresas que han incorporado a su estructura elaborados procesos de automatización para dar respuesta a las exigencias del mercado y los consumidores en materia de calidad, productividad, eficiencia e higiene. La integración de diferentes niveles de automatización en la cadena de valor proporciona a la industria alimentaria ventajas decisivas relacionadas con la producción, el embalaje y el almacenamiento, a la vez que aportan fiabilidad, precisión y rapidez incluso en condiciones de trabajo difíciles.
En el año 2000, en España, la presencia de robots en la industria alimentaria española no superaba las 50 instalaciones. Recientemente se ha superado la barrera de las 2000 unidades instaladas, debido a que, a pesar de la crisis global, la industria alimentaria es el sector que contabilizó un mayor incremento en cuanto al número de robots instalados en los últimos años .
El potencial de la robótica en el campo de la alimentación es inmenso. En la actualidad la principal aplicación es el envasado y paletizado del producto terminado pero la presencia de robots empieza a ser habitual en muchas otras fases del proceso de producción.
La utilización de robots en el sector alimentario puede aportas ventajas como:
- Mayor efectividad, mayor velocidad y por tanto mayor productividad
- Mejora de la calidad del producto y consistencia en el cumplimiento de las especificaciones.
- Mejora de la seguridad y protección de los trabajadores frente a ambientes hostiles y trabajos desagradables.
- Reducción de la mano de obra y de los costes de producción.
- Mayor flexibilidad y adaptabilidad a cambios en el proceso.
- Mayor higiene del proceso y reducción del riesgo de contaminación.
En el sector pesquero la automatización de procesos se encuentra menos extendida que en el conjunto del sector alimentario, si bien se han dedicado recursos para la investigación y desarrollo de aplicaciones robóticas y de visión artificial que han dado resultados muy positivos, poniendo de manifiesto su gran potencial en este campo.
La visión artificial, por su parte, es una de las tecnologías que más pueden aportar a la industria alimentaria en procesos de control de calidad. Aunque ninguna máquina puede igualar las capacidades cualitativas e interpretativas de la visión humana, las tareas simples y repetitivas pueden ser desarrolladas mejor por un sistema de visión artificial que por un humano, ya que el primero es inmune al aburrimiento y la fatiga y puede ser más consistente en la calidad de la inspección. Además, en caso de inspecciones sencillas, puede realizar la inspección a velocidades mucho más altas.
Los equipos para procesado de imágenes actualmente son más compactos, mucho más evolucionados y más económicos que los primeros que fueron utilizados a nivel de laboratorio. En la industria alimentaria no ha podido sacarse provecho de esta tecnología durante muchos años debido a la naturaleza variable de la apariencia de los productos.
La tecnología robótica en general también ha tardado en penetrar en la industria alimentaria porque los sistemas robotizados trabajan mejor con productos de tamaños y formas uniformes, y los alimentos no suelen reunir estas características, lo que hace que la maquinaria sea más costosa para los fabricantes de alimentos. Si se consiguen reducir los costes y mejorar los niveles de calidad y seguridad alimentaria, la robótica tendrá mucho más peso en el sector de la alimentación.
ESTADO DEL ARTE
El proceso al que se somete actualmente tanto la pota (Illex Argentinus) como el calamar (Loligo patagónico) es totalmente manual, salvo por las tecnologías de apoyo básicas.
En el primer caso, la pota llega ya eviscerada y congelada de los barcos pesqueros y en la planta, una vez descongelada, se procede a separar las aletas del manto, para su posterior preparación por separado.
En el caso del calamar, la materia prima es el cefalópodo entero congelado. Al llegar a la planta es eviscerado y se le extraen los ojos y el bulbo bucal. Esta acción se realiza tirando de los tentáculos-céfalo-pie para separarlos del manto y extrae a la vez las vísceras y la concha flexible de su interior. El conjunto manto-aletas (ya eviscerado) se conduce a la fase de corte en anillas. Mientras que los tentáculos-céfalo-pie se separan de los ojos y el bulbo bucal mediante un corte con un cuchillo antes de pasar a la siguiente fase del proceso.
Estado del arte: manipulación robótica
Según la Organización Internacional de Normalización (ISO) un robot industrial se define como un "Manipulador multifuncional reprogramable con varios grados de libertad, capaz de manipular materias, piezas, herramientas o dispositivos especiales según trayectorias variables programadas para realizar tareas diversas"
Actualmente hay aproximadamente 1.200.000 de robots industriales en el mundo y el Departamento de Estadística de IFR (International Federation of Robotics) estima un mayor crecimiento del número de instalaciones entre 2014 y 2016 (del orden del 6% de media anual) basándose en el gran potencial de segmentos industriales como el electrónico y el alimentario y en la actual industrialización de los países emergentes.
Tanto los “robots industriales” como los “robots móviles” pueden ser equipados con sensores externos para realizar operaciones inteligentes, denominándose entonces “robots inteligentes”. A su vez, tanto los robots industriales como los móviles inteligentes pueden ser empleados en ámbitos públicos y privados para la interacción con los humanos, denominándose “robots de servicio”.
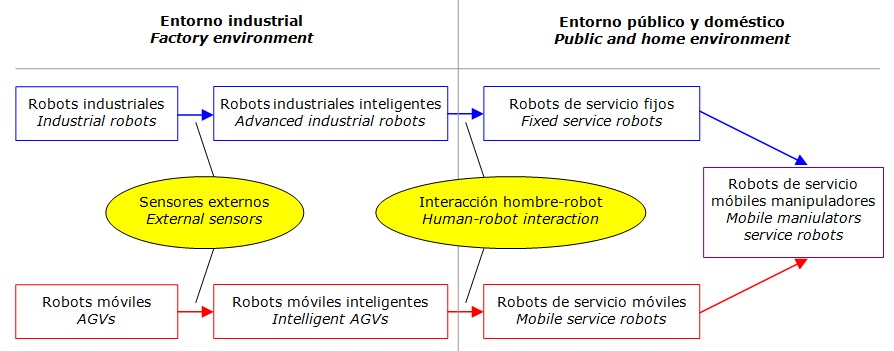
Figura 1: De robots industriales a robots de servicio. Simplificación de Kopacek, P. (2011).
El estado del arte actual de la robótica son los robots industriales fijos no inteligentes. La base para el desarrollo de robots inteligentes son los robots industriales fijos convencionales, los robots móviles no inteligentes y los mecanismos de movimiento. En la actualidad los robots avanzados o inteligentes son prototipos en fase de desarrollo. Los robots inteligentes, tanto industriales como móviles inteligentes evolucionan a robots de servicio, que son uno de los campos de más rápido crecimiento en robótica .
El uso de la robótica en la industria alimentaria se ha incrementado en los últimos años, particularmente en el campo de los sistemas de envasado y paletizado, que se encuentran al final del proceso de producción.
![]()
Figura 2: Áreas de producción con aplicaciones robóticas. Adaptación de Staübli
La causa de la baja presencia de robots en la industria alimentaria se puede encontrar en el hecho de que los productos alimentarios son muy variables en forma, tamaño y estructura, lo que plantea problemas importantes en el desarrollo de herramientas para su manipulación. Contar con una pinza de agarre que maneje estos productos es todo un reto.
Ahora que la tecnología se ha hecho más accesible y los sistemas más inteligentes, podría ser viable automatizar muchas de las tareas complejas y repetitivas que se llevan a cabo en este sector.
La industria alimentaria continuará siendo testigo de un crecimiento lento pero sostenido en el uso de robots hasta que estos sean más económicos y los operadores alimentarios empiecen a confiar más en ellos.
Como ejemplos de automatización de procesos en el sector pesquero se puede mencionar:
- aplicaciones robóticas para la apertura automática de mejillones que permiten triplicar la capacidad de producción (North Island Mussel Processors, Nueva Zelanda). Cada máquina puede procesar hasta 3.600 mejillones en una hora.
- soluciones que combinan el procesamiento y empaquetado de pescado y gambas en un sólo sistema compacto asistido por robots (Cabinplant, Dinamarca).
- robots para el sexado de pescado, como el desarrollado por AZTI-Fatronik-Tecnalia, que permite clasificar dos peces por segundo mediante un sistema de visión que detecta el pescado en una cinta transportadora y una mínima incisión realizada por una garra de manipulación, que no afecta a la calidad del producto.
Estado del arte: visión artificial
La visión artificial es una herramienta de inspección no destructiva, rápida, económica y objetiva así como una herramienta de evaluación basada en el análisis y procesado de imágenes con una variedad de aplicaciones. Las aplicaciones de visión artificial industrial integran sistemas de captura de imágenes digitales, dispositivos de entrada/salida y redes de ordenador para el control de equipos destinados a la fabricación/manipulación, tales como brazos robóticos.
La inspección de productos pesqueros a través de visión artificial supone una alternativa a la evaluación sensorial basada en índices de calidad como el QIM (Quality Index Method) que puntúa la frescura de los productos pesqueros en base a atributos sensoriales (textura, olor y apariencia) y que requieren tiempo y dedicación por parte de observadores expertos. Debido a su fiabilidad, objetividad y repetitividad, la visión artificial también ha demostrado su potencial en la automatización de diversas operaciones en las líneas de proceso de las industrias pesqueras como el dimensionado, pesado, contaje, clasificación, reconocimiento y seguimiento.
La captura, procesado y análisis de imágenes son los principales aspectos a considerar en visión artificial para la evaluación no destructiva de productos pesqueros a través de la evaluación visual de su calidad. Los recientes avances en hardware y software en la industria alimentaria han proporcionado soluciones muy potentes y baratas y de hecho, hay una creciente evidencia de que la visión artificial se está implantando a nivel comercial en la industria pesquera. Entre los muchos ejemplos, podríamos mencionar:
- estimación de biomasa de peces en granjas acuícolas a través del procesado de imágenes en tanques y jaulas.
- Sistema automático de clasificado de pescado abordo que registra datos sobre especies, longitud y peso con fines reglamentarios y de trazabilidad
OBJETIVOS
El objetivo del proyecto AUTOSQUID consiste en el diseño de un sistema para la automatización del eviscerado de cefalópodos, actualmente procesados de manera manual.
Concretamente, lo procesos que serán objeto de diseño son los siguientes:
- Proceso de corte y separación de la aleta del manto de la pota (Illex Argentinus).
- Proceso de evisceración y extracción de ojos y bulbo bucal del calamar (Loligo gahi).
Para conseguir este objetivo, se estudiará y analizará la viabilidad de implantar determinadas tecnologías de vanguardia: la VISIÓN ARTIFICIAL y la MANIPULACIÓN ROBÓTICA, así como otras tecnologías complementarias como la aspiración mediante vacío, el corte mediante chorro de agua o tecnologías de transporte para la disposición de las piezas de forma que puedan ser manipulables mediante robots, en la automatización de determinados procesos de la industria alimentaria que actualmente se llevan a cabo de manera manual.
Este proyecto presenta la posibilidad de dotar a las líneas de procesado de productos pesqueros de una mejora significativa a nivel productivo, un mayor aprovechamiento de las materias primas y una mayor flexibilidad de la planta para adaptarse a las variaciones de productividad que conlleva la demanda del mercado.
Con la automatización de la línea de proceso se persiguen los siguientes fines:
- Un aumento de la productividad:
- Una mejora de la calidad del producto:
- Una mejora en la seguridad y la calidad de trabajo de los empleados:
- Una reducción de los costes de producción:
- Una mejora de la competitividad frente a terceros países fuera de España y de la UE.