
INTRODUCTION
Robot-based automation is a mature, proven technology in many industries such as automotive and electronic. However, it’s relatively new to the food industry which has evolved quickly from a sector based in workforce to a much automated sector. Nowadays there are many companies which have implemented complex automatic processes to fulfil the market and consumer’s requirements in terms of quality, productivity, efficiency and hygiene. The integration of different automation levels in the value chain offers important advantages to the food industry regarding production, packaging and storage. It also contributes with reliability, accuracy and promptness even in hard work conditions.
In 2000 in Spain there were hardly 50 companies in the food industry using robots. Recently, they’ve surpassed 2.000 units installed despite the global crisis because food industry is the sector with the highest growth concerning the use of robots in the last years1.
Robotics has an enormous potential in the food sector. The main use now is for packaging and palletization of finished product but the presence of robots is starting to be usual in other production stages.
The use of robots in the food industry may contribute as follows:
- More efficiency, more speed and therefore more productivity
- Higher quality product and compliance of specifications.
- Better safety and protection of workers in hostile environments and unpleasant works.
- Reduction of workforce and production costs.
- More flexibility and adaptability to changes in the process.
- More hygiene in the process and reduction of pollution risk.
In the fishing sector the process automation is less used than in the whole food sector. However, there have been R+D resources assigned to robotics and artificial vision applications which have been successful showing its potential in this field.
Artificial vision is a technology that may assist a lot to food industry in quality control processes. Although there isn’t any machine that can compare to the qualitative and interpretative skills of human vision simple and repetitive tasks may be performed better by an artificial vision system than by a human being. The artificial one isn’t affected by boredom and fatigue and can be more conscious about the quality of inspection. Moreover, in case of simple inspections it can work much more quickly.
At present image-processing equipment are more compact, more evolved and cheaper than the first ones used at lab level. The food industry couldn’t take advantage of this technology for many years due to the variable appearance of products.
Generally speaking robotics has also been late to get into the food industry because automated systems work better in products with homogeneous sizes and shapes. Food doesn’t have this nature so the equipment is much more expensive for food manufacturers. If costs are reduced as well as quality and safety levels are improved robotics will be much more present in the food sector.
STATE OF ART
Nowadays both squids Illex Argentinus and Loligo patagónico are processed under a completely manual system except for the basic support technologies.
In the first case the squid arrives gutted and frozen from the fishing vessels and once in the processing plant the fins are set apart from the mantle to be prepared separately later on.
In the second case the raw material is the whole frozen cephalopod. Once in the plant guts, eyes and buccal bulb are extracted. This is performed pulling the tentacles to separate them from the mantle and extract viscera and pen at the same time. The whole mantle with fins –already gutted- is taken to be cut into rings. Meanwhile the tentacles are separated from the eyes and the buccal bulb cutting with a knife before advancing to the next processing stage.
State of the art: robotics
According to the International Organization for Standardization (ISO) a manipulating industrial robot can be defined as “an automatically controlled, reprogrammable, multipurpose manipulator programmable in three or more axes which may be either fixed in place or mobile for use in industrial automation applications”.
Nowadays, there is approximately 1.200.000 of industrial robots in the world. The IFR Statistical Department estimates a further growth of robot installations between 2014 and 2016 by 6% on average per year. The growth is based on huge potentials of further penetration of the industrial segments like electronics or food and on the on-going industrialization of the emerging countries.
Both Industrial robots and Autonomous guided vehicles (AGV) can be equipped with external sensors for intelligent operations and are so called “intelligent” robots. At the same time, both intelligent industrial robots and Intelligent AGV are used for service tasks, as “service robots”
At the same time, both industrial robots and intelligent mobile robots may be used in public and private fields for the interaction with humans and they’re known as “service robots”.
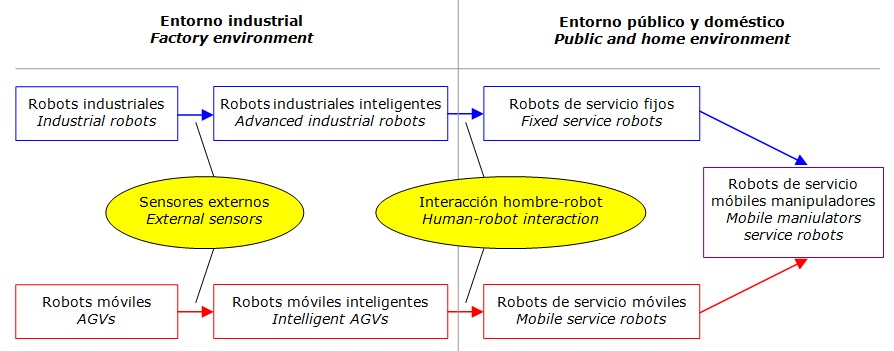
Figure 1: From industrial to service robots. Simplification de Kopacek, P. (2011)
Stationary, unintelligent industrial robots are nowadays state of the art in industry. The roots for the development of intelligent robots were conventional, stationary industrial robots; mobile, unintelligent platforms (robots) and walking mechanisms. At present advanced robots are in the prototype or development stage. Intelligent industrial and mobile robots are the basis for “service robots”, that is one of the fast growing fields in robotics .
The use of robotics in the food industry has increased over recent years, particularly in the field of packaging and palletizing systems, being at the end of the food production process.
![]()
Figure 2: Production areas with robotic applications. Adapted from Staübli
The cause of the low presence of robots in the food industry can be due to the fact that food products are highly variable both in shape, sizes and structure which poses a major problem for the development of manipulators for its handling. Having a gripper that can handle them poses a challenge.
Now that the technology is becoming more affordable and the systems more intelligent, it may be feasible to automate many of the complex and repetitive tasks that are carried out in the food industry.
The food industry will continue to see a slow but steady growth in robots until they become cheaper and food processors gain confidence in them.
As examples of process automation in the fishing sector, we can mention:
- Robot applications for the automatic opening of mussels which allow tripling production capacity (North Island Mussel Processors, New Zealand). Each machine can process up to 3.600 mussels per hour.
- Solutions which combine fish and prawns processing and packaging in a compact system assisted by robots (Cabinplant, Denmark).
- Robots for the fish sexing like that developed by AZTI-Fatronik-Tecnalia which allows the classification of two fishes per second by a vision system. This system detects the fish in a transport belt with a minimum incision by a handling gripper that doesn’t modify the product’s quality.
State of the art: computer vision
Machine/computer vision is a non-destructive, rapid, economic, consistent and objective inspection tool and is also an evaluation technique based on image analysis and processing with a variety of applications.
Industrial applications for computer vision integrate systems for images capturing, in/out devices and computer networks for the control of equipment devoted to manufacturing/manipulation, such as robotic arms.
Fish product inspection through computer vision means an alternative to the sensory evaluation based on quality indexes. The most common method is the Quality Index Method (QIM) that provides a demerit point-scoring system to determine freshness establishing the quality indexes for important sensory attributes (e.g., texture, odour, and appearance). However, in most cases, complete sensorial inspections are time-consuming and labour-intensive for the part or expert observers.
As a result of its reliability, objectivity and repeatability, machine vision has demonstrated its potential for automation of several operations in fish processing. Sizing, weighing, counting, grading, classification, recognition, and monitoring are some of the applications of machine vision in fishery industries
Capturing, processing and analyzing images are the main aspects to be considered in machine vision for non-destructive assessment of fish products via visual evaluation of their quality. Low-cost powerful solutions were provided by recent advances in hardware and software in the food industry. In fact, there is increasing evidence that machine vision is being adopted at the commercial level. Among all the examples, we can mention:
- Biomass estimation in fish farms conducted by image processing of fish in tanks and cages.
- Computer vision-based quality-grading methods, introduced for the determination of size and shape of whole Atlantic salmon.
- Different methods for the automatic detection of the species of live fish through image-processing system.
- Estimation of length and weight of gilthead sea breams, weight of salmon and other species as Alaskan Pollock, Rainbow trout, herring or tilapia using machine vision and image analysis.
- Changes in area, shape and thickness of Atlantic Cod and Atlantic salmon fillets during rigor mortis and ice storage measured by imaging technology in 2D and 3D modes.
- Image processing employed to estimate the fat content of Atlantic salmon fillets, rainbow trout cutlets and brown trout cutlets.
- Introduction of a bleed-cutting robot, with a 3D machine-vision system, which killed pre-anaesthetized salmonids.
- Accurate measurements of gill position using imaging systems to adjust the de-heading machine uses in order to increase accuracy and to minimize the waste in de-heading.
- Automated pin-bone removal line for the processing of Atlantic salmon fillets, where the pin-bone tendon attachments are cut before the pin bones are removed.
OBJECTIVES
The objective of AUTOSQUID Project consists on the design of a system for the automatic gutting of cephalopods which are currently processed manually.
In particular the processes to be designed are the following:
- Cut and remove of the fin from the Illex mantle
- Gutting and extraction of eyes and buccal bulb from Loligo
To achieve this goal there will be viability studies and analysis on the implementation of certain cutting-edge technologies: ARTIFICIAL VISION and ROBOT HANDLING as well as on other complementary technologies such as aspiration by vacuum, cut by water stream or transport technologies to place the pieces in a way that can be handled by robots. Also on the automation of certain processes in the food industry that are now carried on manually.
This project offers the possibility to the seafood processing lines to improve significantly at production level, together with a better use of raw material and a higher flexibility of the processing plant to adapt to the production variations given by the market demand.
The automation of processing line intends to achieve the following:
- Increasing productivity
- Improving the quality of product
- Improving safety and quality of the work for employees
- Reduction of production costs
- Improving competitiveness before third countries outside Spain and the EU.